![]()
"Suche nicht nach Fehlern, suche nach Lösungen."
Henry Ford

Im Bereich Engineering entwickeln wir auftragsbezogen für unsere Kunden individuelle kinematische Lösungen. Meist unterliegen diese erarbeiteten Lösungen einer Geheimhaltung und können deswegen nicht gezeigt werden. Untenstehendes Vorgehensmodell verdeutlicht jedoch die Zusammenarbeit im Bereich Engineering mit dem Kunden.
Dabei sind für uns Vertrauen und Fairness die wichtigsten Voraussetzungen für eine erfolgreiche und langfristige Zusammenarbeit.

Task__>__Idea__>__Solution
dies ist das MOTTO unseres Ingenieur-Dienstleistungsunternehmens.
Wagen Sie mit uns den Sprung !
Kennen Sie das Gefühl der Enge, des Wettbewerbsdrucks, der hohen Nachlässe? Dann ist es höchste Zeit für Innovationen in Ihrem Unternehmen, denn oftmals sieht man die Chancen um einen herum nicht. Wagen Sie den Sprung, denn eine Innovation steht für die große Chance wieder ungestört wachsen zu können und den Wettbewerb auf Distanz zu halten.
Wir haben es uns zur Aufgabe gemacht, Unternehmen bei der Umsetzung von Ideen zu unterstützen.
Vorgehensweise anhand von zwei Beispielen:
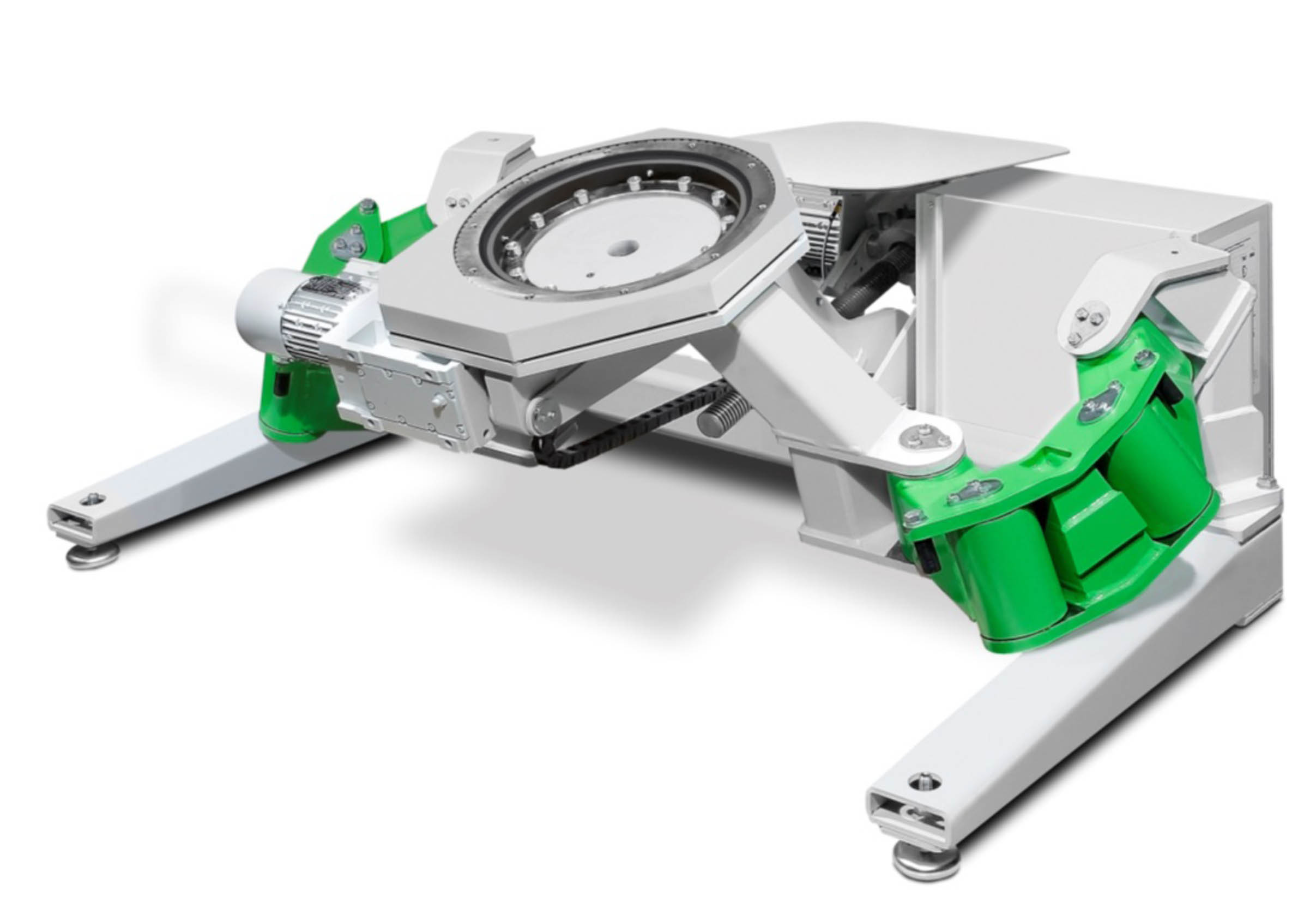
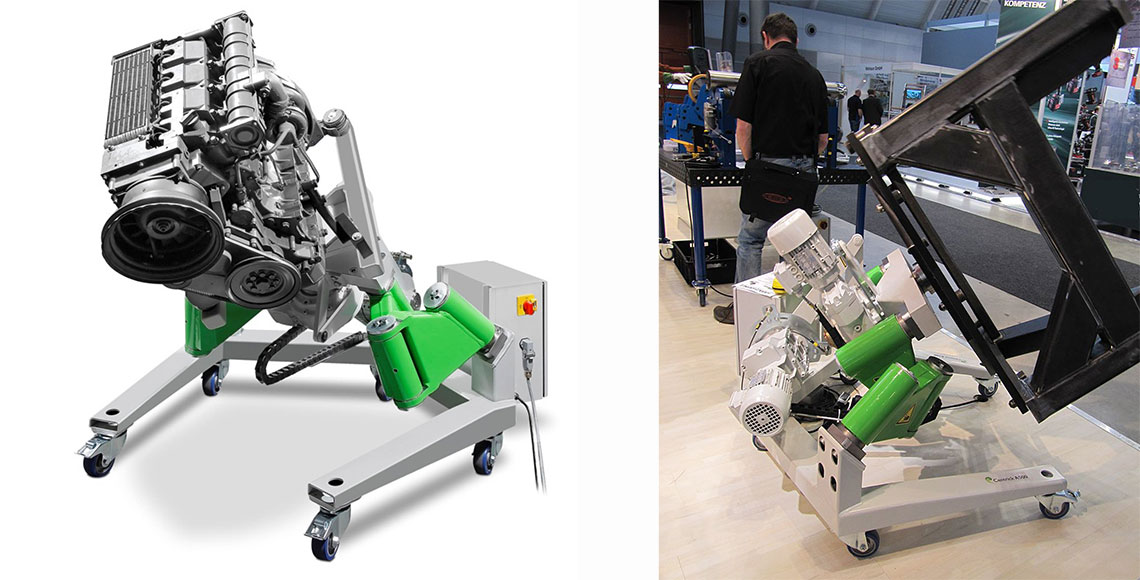
1. CENTRICK - Innovativer Montage- und Handhabungsmanipulator
1. Centrick - Innovativer Montage- und Handhabungsmanipulator
Entwicklung für die Fa. Schreiber Metalltechnik und Maschinenbau in Filderstadt. Das Projekt wurde durch AiF Innovationsförderung unterstützt.
Task:
Problemstellung
Bisherige Systeme verlagern beim Kippen der Werkstücke ihren Schwerpunkt. Dadurch würde der ganze Manipulator umkippen. Zur Vermeidung muss dieser fest im Boden verdübelt werden.
Aufgabenstellung
Die Entwicklung eines innovativen Montage- und Handhabungsmanipulators.
Anforderungen
Kippsicherheit, geringer Energiebedarf, geringer Arbeitsraum, beweglicher Manipulator auf Rollen.
Idea: Verwendung des virtuellen Drehpunktes zur Weiterentwicklung der virtuellen Drehachse.
Solution: Aus der Ideenphase resultierten die ersten Grundlagen zur virtuellen Drehachse. Die nachfolgende Berechnungs- und Entwurfsphase lieferte die Grundlage und Dimensionierung der Bauteile und Lager. Diese Auslegungen und Daten wurden in der nachfolgenden Konstruktionsphase in eine 3D Konstruktion erfolgreich umgesetzt. In der letzen Optimierungs-Phase wurde das Produkt CENTRICK weiter verfeinert und optimiert. Weitere Infos: www.centrick.de
2. SPU - Space Positionining Unit, ein Anwendungsbeispiel der Industrie 4.0
Entwicklung eines Manipulatorsystems für das schwebende Montieren und Handhaben von Lasten in Fertigung und Montage.
Task:
Problemstellung
Bei sämtlichen Montage- und Handlingoperationen muss der Werker den Kran mit einer Steuerbirne steuern. Dadurch steht ihm nur eine Hand für die wertschöpfenden Aufgaben zur Verfügung. Zwar existieren bekannte Robotersysteme für Montage- und Handlingoperationen, jedoch gewährleisten diese keine Flexibilität hinsichtlich Werkstückabmessungen und Sicherheit.
Aufgabenstellung
Entwicklung eines innovativen Manipulators, der den Werker intuitiv bei der Montage und dem Handhaben von schweren Werkstücken unterstützt und damit entlastet.
Anforderungen
Kippsicherheit, geringer Energiebedarf, geringer Arbeitsraum, beweglicher Manipulator auf Rollen.
Idea: Verwendung von Wegsensoren, um das Werkstück in einen schwebenden Zustand zu versetzen, sodass es dem Werker mit geringstem Kraftaufwand möglich ist seine Tätigkeit zu verrichten.
Solution: In der Ideenphase wurde ein erstes Konzept zur SPU entwickelt. Aus der darauffolgenden Berechnungs- und Entwurfsphase resultierte die Grundlage und Dimensionierung der Bauteile und Lager. Diese ermittelten Daten wurden schließlich in der Konstruktionsphase erfolgreich in eine 3D CAD Konstruktion umgesetzt.
Auf Anfrage schicken wir Ihnen gerne einen Kurzfilm, der das Prinzip der SPU noch besser veranschaulicht.
Auf Anfrage schicken wir Ihnen gerne einen Kurzfilm, der das Prinzip der SPU noch besser veranschaulicht.
Ihre Aufgabenstellung kombiniert mit der Unterstützung von EB-invent Engineering birgt das Potential auch Ihrem Unternehmen zu einem Sprung zu verhelfen.
Interessiert?
![]()